Choosing AVR programmer
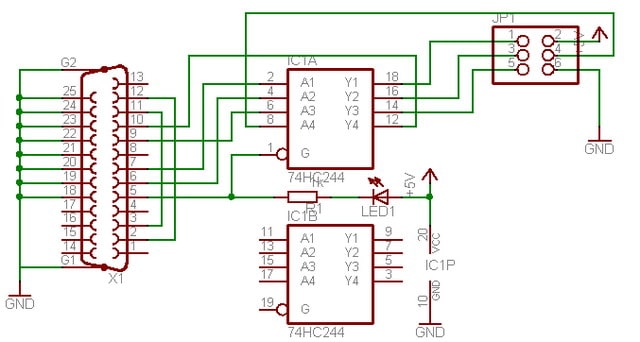
There are many AVR programmers to choose from. The simplest ones are bitbang programmers. These are straightforward programmers that can be built with as few components as few resistors (or no resistors at all). These can be COM, LPT, or USB-to-TTL converter based. DIY Bitband programmers Example of LPT port programmer These are probably the simplest to build, as there is no need to convert any signals from the port. Buffer chip is used only for safety reasons to protect computer port. Even simpler programmer cable can be found here.